Gracias por entrar en mi blog, soy un apasionado y estudiante de robótica que pretende divulgar esta tecnología. En esta web vas a poder aprender como el mundo de la robótica ha evolucionado a gran velocidad en las últimas décadas. Espero que disfrutes del contenido!!!
Qué es un robot y para qué sirve
Un robot, también llamado brazo robótico, es un tipo de brazo mecánico similar al brazo humano. Tiene varios segmentos que se parecen mucho al hombro, al codo y a la muñeca. Un brazo robótico es programable y puede ser dirigido para realizar una variedad de funciones al igual que el brazo humano.
Artículos de robots

MassRobotics y THL realizan el mayor HUB
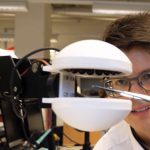
La pinza acústica, una nueva alternativa de agarre
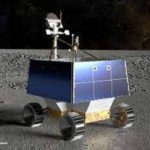
El robot que la NASA mandará a la luna se llama Viper y costará 200 millones
Historia de los primeros robots industriales
El brazo robótico fue inventado en 1954 cuando un inventor autodidacta llamado George Devol solicitó la patente de un brazo mecánico que podía ser programado para repetir tareas precisas. El Sr. Devol explicó entonces su concepto a un ingeniero de nombre Joseph Engelberger y los dos juntos lo llamaron Unimation.
El Sr. Engelberger entonces formó una compañía llamada Unimation Inc. y usó las ideas del Sr. Devol para crear el brazo robótico Unimate. Este esfuerzo tuvo bastante éxito y General Motors puso unos cientos de brazos Unimate en su fábrica.
El concepto pronto se extendió y compañías como Ford y Chrysler también se convirtieron en clientes de Unimate. Los japoneses también fueron receptivos a la idea, y pronto, los brazos robóticos se convirtieron en un fenómeno global. El Sr. Devol fue incluido en el Salón Nacional de la Fama en el año 2011 por su patente del primer brazo robótico programable operado digitalmente del mundo.
El movimiento del brazo robótico industrial
El brazo robótico es el tipo más común de robot de fabricación. Está típicamente compuesto de siete segmentos con seis articulaciones accionadas por motores paso a paso. Un usuario puede controlar el brazo robótico a través de una computadora controlando los motores paso a paso en las articulaciones.
Dado que los motores paso a paso se mueven en incrementos controlados, se puede hacer que el brazo robótico se mueva de manera muy precisa repetidamente con un alto nivel de precisión y fiabilidad. Hay sensores de movimiento en las articulaciones del brazo robótico que proporcionan retroalimentación y permiten que el robot se mueva de manera controlada.
Debido a la repetibilidad y la precisión, los brazos robóticos se utilizan para funciones que son difíciles, repetitivas y a menudo aburridas para los humanos. Las funciones que se consideran peligrosas para los seres humanos también pueden realizarse utilizando brazos robóticos.
Como el robot tiene seis articulaciones, puede pivotar de seis maneras diferentes. Se dice que tiene seis grados de libertad. El brazo humano, en comparación, tiene siete grados de libertad.
Como el hombro humano está fijado a una estructura estacionaria (el cuerpo y el torso), el equivalente del «hombro» de un brazo robótico también está montado a un componente de base estacionario que no se mueve. Los segmentos restantes del brazo robótico son los que se mueven en diferentes direcciones.
Cómo se programa un robot
Para «enseñar» al robot la secuencia de movimientos que debe realizar una y otra vez para llevar a cabo el trabajo en cuestión, se utiliza inicialmente un controlador de mano. Un programador o el usuario guía al brazo robótico a través de cada movimiento de la secuencia que debe seguirse para realizar una tarea específica.
El robot almacena información sobre estos movimientos en su memoria y luego sigue la misma secuencia exacta cada vez. Por ejemplo, si se va a utilizar un robot para girar las tapas de las botellas de un frasco de comida, el programador utilizará inicialmente un controlador para hacer que el robot recoja la tapa de la botella y la gire en una botella que se comporte de la misma manera.
Una vez que esta secuencia se introduce en la memoria del brazo robótico, seguirá recogiendo tapas de botellas y retorciéndolas en cada frasco que pase por la línea de montaje.
Los brazos robóticos pueden ser programados para realizar otras funciones similares. Se pueden hacer para apretar tornillos, juntar componentes de un coche, e incluso ajustar microchips en una computadora. Dependiendo del tipo de efector final instalado en el brazo robótico, todo, desde pequeños componentes que requieren manos hábiles hasta grandes y pesados componentes que requieren fuerza y resistencia, pueden ser manejados programando el robot en consecuencia.
Un efector final es un dispositivo situado en el extremo de un brazo robótico. Está diseñado para interactuar con el entorno en el que se va a utilizar el brazo robótico. Puedes pensar en el efector final como la aplicación que hace que el brazo robótico realice una variedad de funciones. El trabajo del brazo robótico es mover el efector final de un lugar a otro basado en los comandos que el usuario envía a través de una computadora de control.
Un brazo robótico puede ser equipado con una variedad de efectores finales. Uno de los efectores finales más comunes es el que se asemeja a la mano humana. Se utiliza ampliamente para recoger, agarrar y transportar diferentes tipos de objetos.
El diseño del efector final dependerá de las aplicaciones para las que se pretende utilizar el brazo robótico. El efector final también se conoce como mano robótica. Puede diseñarse para realizar operaciones de hilado, agarre, soldadura y ensamblaje.
El efector final de la mano humana tiene sensores de presión incorporados que comunican la fuerza con la que el efector final está agarrando algo. Esta retroalimentación es muy importante porque evita que el efector rompa un objeto al sujetarlo demasiado fuerte o que deje caer un objeto al sujetarlo demasiado flojo.
Otros tipos de efectores finales incluyen sopletes que se usan para calentar una superficie o soldar algo. Un efector final también puede tener un taladro que permite al brazo robótico hacer agujeros para fijar los tornillos. Puede seguir perforando millones de agujeros una y otra vez en el mismo punto exacto de un subconjunto de piezas.
Un efector final también puede tener un módulo de pintura en aerosol que permite al brazo robótico pintar productos. Los humanos experimentarán dolores de brazo y hombro después de realizar un cierto número de trabajos de pintura en aerosol. Inhalar los vapores tóxicos de la pintura también puede ser malo para la salud de un empleado. Un brazo robótico puede realizar estos trabajos relativamente «peligrosos» con gran precisión y fiabilidad.
Tipos de brazos robóticos
Hay diferentes tipos de brazos robóticos que se utilizan para fines específicos.
- Brazo robótico esférico o polar: Este tipo de brazo robótico tiene ejes que forman un sistema de coordenadas polares. Los brazos robóticos esféricos pueden utilizarse para la soldadura con gas, la soldadura por arco, la soldadura por puntos, la fundición a presión, las máquinas de rebaba y la manipulación de máquinas herramienta.
- Brazo robótico cartesiano: Este brazo robótico tiene tres articulaciones prismáticas. Los ejes de estas articulaciones coinciden con un coordinador cartesiano. Un brazo robótico cartesiano puede ser usado para funciones de «pick and place», operaciones de ensamblaje, soldadura por arco y manejo de máquinas herramientas.
- Brazo robótico cilíndrico: Este tipo de sistema tiene ejes que forman un sistema de coordenadas cilíndricas. Los brazos robóticos cilíndricos pueden utilizarse para la soldadura por puntos, la manipulación de máquinas de fundición a presión y otras máquinas herramienta, así como para operaciones de ensamblaje.
- Brazo robótico articulado: Este brazo robótico tiene al menos tres juntas rotativas. Los modelos avanzados también pueden tener hasta diez articulaciones. Cada articulación se considera un eje y puede proporcionar un grado adicional de libertad. Puede ser usado para pintura en aerosol, máquinas de ensamblaje, soldadura con gas, soldadura por arco, fundición a presión y operaciones de ensamblaje.
- Brazo robótico antropomórfico: Este tipo de brazo robótico es el sistema mecánico más parecido al brazo humano. Incluso tiene dedos y pulgares. Puede realizar una amplia variedad de funciones.
- Brazo robótico Scara: Este tipo de brazo robótico tiene dos articulaciones giratorias paralelas que proporcionan conformidad en un plano. Se puede utilizar para aplicar sellador, realizar funciones de recogida y colocación, manejar operaciones de ensamblaje y trabajar con máquinas herramienta.